DIY F330/F450四轴尼龙机架飞不稳——飞行异常记录
前言
小时候就梦想玩遥控灰机,也曾有过机会玩某宝上100来块钱的玩具直升机,不过都是因为没有空旷场地,也没有经验,首飞即炸机,然后成了家里装饰品…😪
如今人儿长大了,诚心自组一台四轴vanvan,(毕竟穷买不起DJI,正也是因为穷才有这篇文章,事实证明瞎折腾。😰
组装过程
因为没有四轴飞行经验,但拥有电子设计相关的一点点经验,我人生中第一台四轴飞行器机架便采用常见的廉价F450尼龙机架。

电机与螺旋桨通过某宝够买二手拆机,电调自己做板,基于BLHeli_s,电池在闲鱼购买电芯自组4S,飞控为了省钱也是逛咸鱼收的(Pixhawk 3 Pro),暂时只有这些,也就是说只有机架是新的。
遥控器方面是使用在学校白嫖的(bushi)FrSky i6x。
其实这些都不重要。😅
飞控固件使用PIX4 V1.12.3(其实ArduPilot的ArduCopter V4.1.2在排除故障的时候也试过,但结果是两个固件都存在着一样的问题)。
通过电脑上位机校准好所有传感器。
开始起飞!
诶?四轴怎么YAW(航向角)非常难控制甚至无法控制,然后为什么还会自己转机头(逆时针),这怎么玩啊,(然后还炸了好几次,虽然没什么事。
我恼啊,出大事了,这全都是不知道有没有问题的硬件,除了机架是新的,其他都不知道有没有问题,芭比Q了这波。
开始怀疑
怀疑固件,PIX4和ArduCopter之间换,结果一样。
电调换成XXD,结果一样。
飞控校准好几次,结果一样。
开始怀疑起来了电调和电机,卸下螺旋桨,听电机声音,有点怪的换了(虽然换上去的还是二手😅),问题照旧。
好的怀疑人生。🤬
飞行日志
抓住最后的机会,看飞行日志!
看了半天,看出来了个奇怪的地方
(这尿尿咋分叉了?🙃
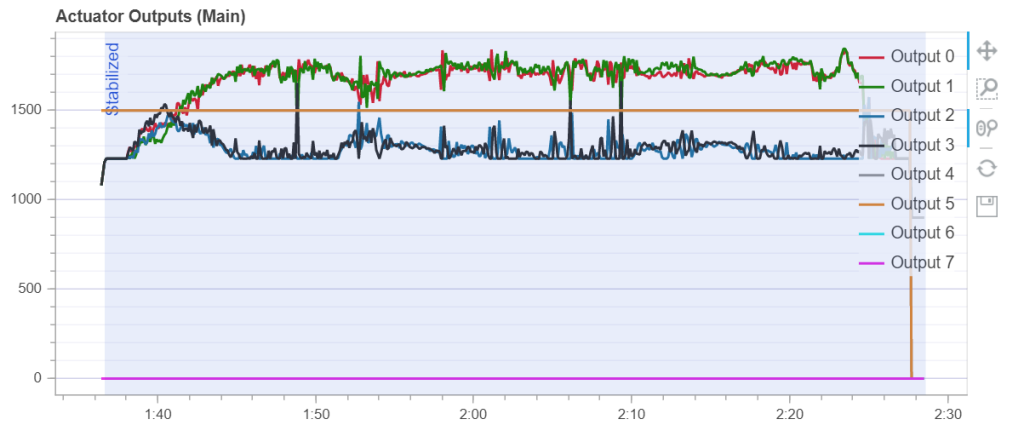
从图中可以看出来,0/1和2/3分开了。
0和1对应的就是电机1和2,而四轴中的的电机分布如下图所示。
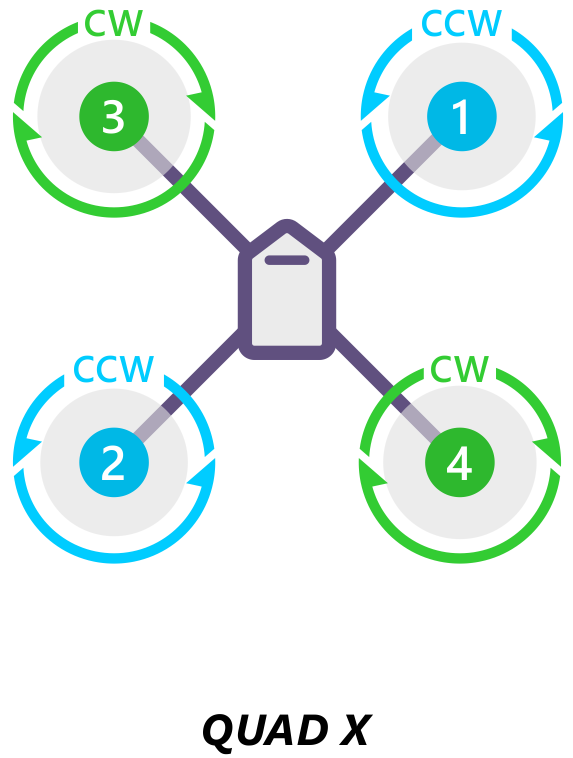
事件原因
这正好就是两个CCW(逆时针)电机,意味着他们的转速大于电机3和4号,而根据牛顿…算了忘了,力的作用是相互的,电机1和2逆时针旋转的时候,螺旋桨给予空气一个…编不下去了。😂
当旋翼由发动机通过旋转轴带动旋转时,旋翼给空气以作用力矩(或称扭矩),空气必然在同一时间以大小相等、方向相反的反作用 力矩作用于旋翼(或称反扭矩),从而再通过旋翼将这一反作用力矩传递到直升机机体上。如果不采取措施予以平衡,那么这个反作用力矩就会使直升机逆旋翼转动方向旋转。(百毒百科)
意思就是四轴有逆时针旋转的趋向而飞控在极力修正,(问题是我压根没打杆啊…
究竟为啥?
为了排除是DIY电调的问题,使用信号发生器+转速表,看看是不是电调在收到高转速信号的时候却输出低转速。
而就在这时,我一个一个电调进行测试,其中把油门一拉高就看见了电机1和2竟然歪向左边,意味着螺旋桨本来应该产生垂直向上的力变成了向左和向上的力的合力,有了向左的分力导致四轴整体具有逆时针旋转的趋势,而飞控发现了,就在极力修正,正因为飞控已经在极力修正YAW导致通过遥控拉杆YAW得不到应有的相应(为了抵消由电机不正带来的机身自旋,修正已满偏)。
说实话狗血都吐了😤,全都是二手只有机架是新的,原因竟然就是因为机架!
最终原因是因为尼龙机臂歪了!强行强行扳直就好了!😅
然后就有了这图:(分叉是手动在调YAW)
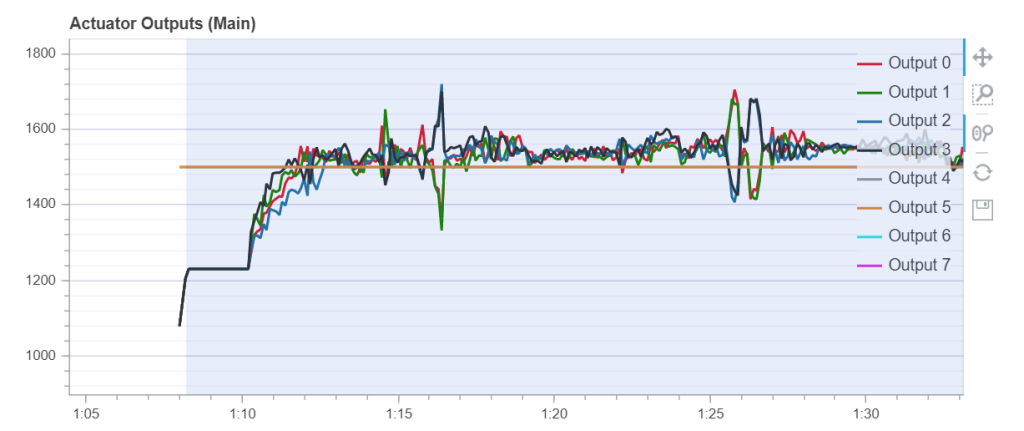
这样的图才是正常的!!!
ps:还是买大疆吧,一步到位不用折腾,折腾的时间用来上班赚钱,舒服得多🙂